
在ROS中,计算图(ROS Computation Graph)是一个核心概念,它描述了ROS节点之间的数据流动和通信方式。它不仅仅是一个通信网络,它也反映了ROS设计哲学的核心——灵活性、模块化和可重用性。通过细致探讨计算图的高级特性和实际应用,我们可以更全面地理解其在机器人软件开发中的重要性。 ROS计算图简介 ROS计算图是ROS架构中的一个关键组成部分,它是由多个处理单元(节点)以及这些单元之间的通信链接(主题、服务和动作)构成的网络。每个节点代表ROS中运行的一个进程,负责处理数据并完成特定的任务,如感知…

自2015年底首次踏入ROS(Robot Operating System)的世界以来,我在机器人领域的旅程已近九年。这段历程始于团队几位志同道合的小伙伴在业余时间的自发学习,逐渐演变成成立了一个致力于英特尔硬件平台与ROS框架集成优化的专业团队,最终发展到为商业客户提供基于ROS和英特尔平台的产品设计支持。这一路走来,经历了无数的挑战与成长。为了纪念这一段充满成长与探索的旅程,我计划整理一下积累的知识与经验为一系列的学习性文章,与同样醉心于ROS世界的朋友们分享,希望我们能够一同学习,共同进步。在这份知识的传递与…

近期三星电子中国研究院与中国工程院外籍院士张建伟教授、孙富春教授和方斌教授合作,提出RobotGPT,探讨了ChatGPT在机器人操控应用中的应用,旨在推进相关实际实施,使ChatGPT能够为智能体(Agent)训练生成动作代码。该系统赋予机器人使用自然语言进行理性互动的能力,便于执行如拾取和放置等任务。 RobotGPT论文链接:https://ieeexplore.ieee.org/document/10412086 概要 RobotGPT是⼀种优先考虑稳定性和安全性的机器⼈操作创新决策框架。 ChatGPT⽣…
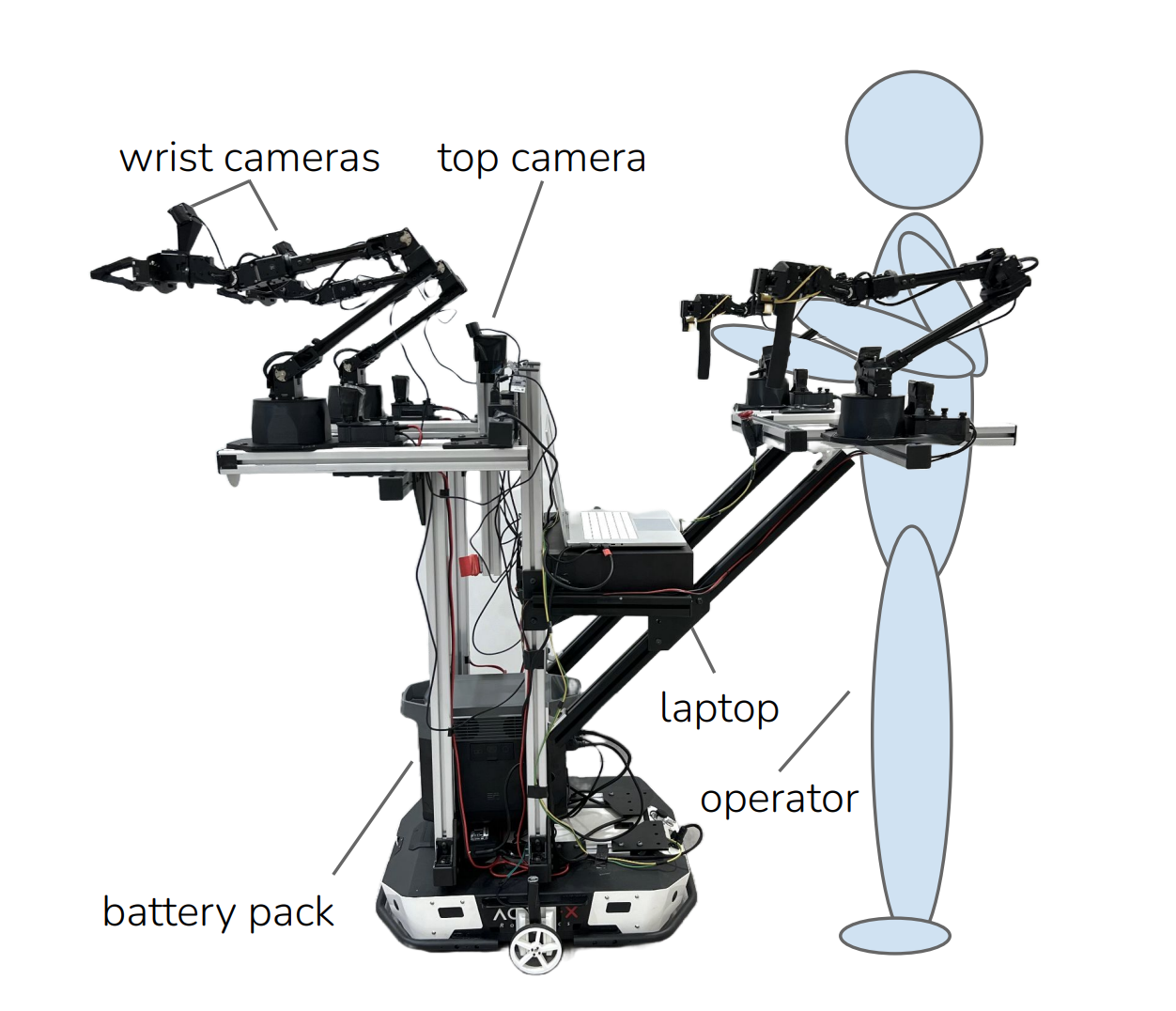
本文主要内容素材来自Mobile ALOHA项目网站,在此进行翻译和整理,帮助小伙伴们更好地了解如何搭建Mobile ALOHA机器人的硬件平台。 硬件物料清单(Bill of Material) 物料名 数量 购买链接 单价 机器人 ViperX 300六轴机械臂 2 https://www.trossenrobotics.com/viperx-300-robot-arm-6dof.aspx包含DYNAMIXEL XM540-W270-T驱动器 (7 units) 和DYNAMIXEL XM430-W350-T驱…
最近这几天,在机器人领域最火的一个话题,非Mobile ALOHA项目莫属了。不管是在Youtube,科技网站,还是国内微信公众号视频号,到处都能看到Mobile ALOHA相关的报道和视频。我也跟着这股热潮,深入了解了一下Mobile ALOHA,整理出来一些内容,跟大家一起学习分享。 Mobile ALOHA(一种用于双手远程操作的低成本开源硬件系统),主要解决了机器人训练需要人类操作员仔细指导的移动双手机器人的高成本和技术挑战。它的成本只是现成系统的一小部分,并且可以从少至 50 次的人类演示中学习。这个新系…





 今日访客人数 :
今日访客人数 :  本月访客人数 :
本月访客人数 :  今年访客人数 :
今年访客人数 :  总访客人数 : 448521
总访客人数 : 448521 今日浏览量 :
今日浏览量 :  总浏览量 :
总浏览量 :  在线总人数 :
在线总人数 : 您的IP地址 : 216.73.216.169