
本篇工程实践将详细描述人形机器人大小脑混合控制Vision–Language–Action(VLA)架构 Isaac-GR00T N1.5 如何通过OpenVINO在Intel生态软硬件平台上成功启用并完成推理。OpenVINO 极大程度拓宽了模型部署的可选择性,同时带来更优的推理性能。 GR00T概要介绍 GR00T背景与主要资料 GR00T N1 是首款开源、可定制且预训练的人形机器人基础模型,拥有“System 1”(快速反应动作)与“System 2”(推理规划)的双系统架构。 GR00T N1.5于202…

NVIDIA Isaac GR00T(Generalist Robot 00 Technology)是一个用于构建机器人基础模型和数据管道的研发平台,旨在加速智能、适应性机器人的创建。 Isaac GR00T N1.5 是GR00T N1 的首次重大更新,Isaac GR00T N1 是全球首个用于广义人形机器人推理和技能的开放基础模型。该跨具体化模型能够处理包括语言和图像在内的多模态输入,以便在各种环境中执行操作任务。它可以通过后期训练适应特定的具体化、任务和环境。 在此博客中,我们将演示如何使用来自单…
如今,移动机器人凭借在效率、场景适应性、经济性等方面的优势,已日趋广泛地应用于工业巡检、安防巡逻、园区服务等诸多场景中,并展现出了巨大的发展潜力。 据新战略移动机器人产业研究所统计,2023年中国移动机器人(AGV/AMR)销售量达 125000台,同比增长34.41%1。其中,自主移动机器人(AMR)实现了尤为显著的增长,2023年销售台数约49000台,同比增长60.13%2。 而在实际应用场景中,要想加速移动机器人的场景化落地,满足用户对移动机器人日渐增长的需求,机器人产品与方案提供商需要在算力、稳定性、经济…

YOLOv10由清华大学研究人员使用Ultralytics Python 软件包开发,通过改进模型架构和消除非最大抑制 (NMS),为实时物体检测提供了一种新方法。这些优化可以以较低的计算需求实现最先进的性能。大量实验表明,YOLOv10 在各种模型规模上都提供了出色的准确率-延迟权衡。 我以前也在各种项目中使用过 YOLO 模型,因为在预训练模型中,YOLO 模型在性能和效率方面比其他模型更突出。然而,由于依赖非最大抑制 (NMS) 和架构效率低下,实时对象检测面临挑战。YOLOv10 通过消除 NMS…

在ROS2中,服务质量(QoS,Quality of Service)允许开发者指定和调整通信中的各种参数,以满足不同场景下对数据处理速度、可靠性和实时性的需求。QoS参数影响着ROS2节点间消息传递的行为,包括消息的可靠性、持久性、传输速度等。通过合理配置这些参数,可以优化系统性能,特别是在不同的网络条件和硬件资源限制下。 ROS 2 QoS 概述 ROS 2 提供了丰富的 QoS 策略( policy ),允许您调整节点之间的通信。 通过正确的服务质量策略集,ROS 2 可以像 TCP 一样可靠,也可以像 UD…

管理节点简介 管理机器人操作系统(ROS)框架内节点的生命周期对于创建稳健可靠的机器人应用至关重要。在ROS 1时期一个常见的抱怨是缺乏对节点生命周期的控制。例如,传感器读取器节点在传感器驱动节点准备就绪之前就开始操作的情景。这种情况可能导致系统错误。ROS 2通过一种被称为管理节点(Managed Nodes)的优雅解决方案来解决这一问题,引入生命周期(Life Cycle)管理的结构化方法,增强了机器人应用的稳定性和可预测性。 在ROS 2中,管理节点以C++实现(Python支持待定),这是确保开发者拥有构建…

ROS2的启动系统(launch)是一种用于启动和配置ROS2节点、参数和其他组件的XML格式文件。与ROS1中的launch文件类似,ROS2的启动文件允许用户以可组合和灵活的方式启动多个节点,并为它们设置参数和调整配置。 启动系统简介 ROS 2 中的启动系统负责帮助用户描述其系统的配置,然后按照描述执行它。 系统的配置包括运行哪些程序、在哪里运行它们、传递哪些参数以及特定于 ROS 的约定,这些约定可以通过为每个组件提供不同的配置来轻松地在整个系统中重用组件。 它还负责监视启动的进程的状态,并对这些进程的状态…

节点组合(Node Composition)是ROS 2中一个重要且强大的特性,它允许开发者以更灵活和高效的方式来构建和管理机器人软件组件。尽管节点的独立性带来了许多优点,但在某些情况下,将多个节点运行在同一个进程中可能更为高效。这是因为跨进程通信比进程内通信要消耗更多的资源,特别是在消息传递频繁或对延迟要求较高的应用场景中。节点组合(也称为组合节点或节点静态组合)正是为了解决这一问题而引入的。 节点组合的概念 节点组合允许将多个节点加载到同一个进程中,每个节点仍然保持独立的逻辑和功能,但它们可以更高效地共享数据和…
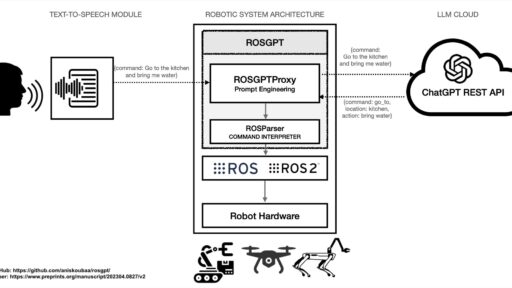
ROSGPT利用大语言模型 (LLM) 的功能来显著推进机器人的人机交互方式,通过从非结构化人类语言输入中引出结构化机器人命令,充分利用LLM的零样本和少样本学习能力。 ROSGPT 是向通用人工智能 (AGI) 迈出的新一步,为机器人和自然语言处理社区合作创造新颖、直观的人机交互铺平了道路。 ROSGPT 的开源项目地址:https://github.com/aniskoubaarosgpt。 ROSGPT的论文原文:https://www.preprints.org/manuscript/202304.0827…

ROS 2中的参数(Parameters)是一种用于在ROS 2系统中配置节点行为的重要机制。参数提供了一种在节点之间共享配置信息的标准化方式,能够在运行时动态地修改节点的行为。在本文中,我们将详细介绍ROS 2参数的概念、结构和使用方法。 参数概述 ROS 2参数允许开发者在节点中定义和使用配置参数,这些参数可以在节点启动时加载,也可以在运行时动态地修改。参数可以用于调整节点的行为、配置算法参数、设置传感器参数等。通过参数,可以使节点更加灵活、可配置,并且能够在不重新编译代码的情况下进行调整。 参数结构 ROS …



 今日访客人数 :
今日访客人数 :  本月访客人数 :
本月访客人数 :  今年访客人数 :
今年访客人数 :  总访客人数 : 455575
总访客人数 : 455575 今日浏览量 :
今日浏览量 :  总浏览量 :
总浏览量 :  在线总人数 :
在线总人数 : 您的IP地址 : 216.73.216.87