
ComfyUI 是Stable Diffusion 的基于节点的用户界面。ComfyUI 由 Comfyanonymous 于 2023 年 1 月创建,用于了解 Stable Diffusion 的工作原理。Stable Diffusion 的创建者 StabilityAI 也使用 ComfyUI 在内部测试 Stable Diffusion。此后,他们还聘请了 Comfyanonymous 来帮助他们开发内部工具。 ComfyUI 简介 ComfyUI 是一个基于节点的界面。基于节点的界面在 3D 设计和 VF…

在ROS2中,服务质量(QoS,Quality of Service)允许开发者指定和调整通信中的各种参数,以满足不同场景下对数据处理速度、可靠性和实时性的需求。QoS参数影响着ROS2节点间消息传递的行为,包括消息的可靠性、持久性、传输速度等。通过合理配置这些参数,可以优化系统性能,特别是在不同的网络条件和硬件资源限制下。 ROS 2 QoS 概述 ROS 2 提供了丰富的 QoS 策略( policy ),允许您调整节点之间的通信。 通过正确的服务质量策略集,ROS 2 可以像 TCP 一样可靠,也可以像 UD…

管理节点简介 管理机器人操作系统(ROS)框架内节点的生命周期对于创建稳健可靠的机器人应用至关重要。在ROS 1时期一个常见的抱怨是缺乏对节点生命周期的控制。例如,传感器读取器节点在传感器驱动节点准备就绪之前就开始操作的情景。这种情况可能导致系统错误。ROS 2通过一种被称为管理节点(Managed Nodes)的优雅解决方案来解决这一问题,引入生命周期(Life Cycle)管理的结构化方法,增强了机器人应用的稳定性和可预测性。 在ROS 2中,管理节点以C++实现(Python支持待定),这是确保开发者拥有构建…

ROS2的启动系统(launch)是一种用于启动和配置ROS2节点、参数和其他组件的XML格式文件。与ROS1中的launch文件类似,ROS2的启动文件允许用户以可组合和灵活的方式启动多个节点,并为它们设置参数和调整配置。 启动系统简介 ROS 2 中的启动系统负责帮助用户描述其系统的配置,然后按照描述执行它。 系统的配置包括运行哪些程序、在哪里运行它们、传递哪些参数以及特定于 ROS 的约定,这些约定可以通过为每个组件提供不同的配置来轻松地在整个系统中重用组件。 它还负责监视启动的进程的状态,并对这些进程的状态…

节点组合(Node Composition)是ROS 2中一个重要且强大的特性,它允许开发者以更灵活和高效的方式来构建和管理机器人软件组件。尽管节点的独立性带来了许多优点,但在某些情况下,将多个节点运行在同一个进程中可能更为高效。这是因为跨进程通信比进程内通信要消耗更多的资源,特别是在消息传递频繁或对延迟要求较高的应用场景中。节点组合(也称为组合节点或节点静态组合)正是为了解决这一问题而引入的。 节点组合的概念 节点组合允许将多个节点加载到同一个进程中,每个节点仍然保持独立的逻辑和功能,但它们可以更高效地共享数据和…

TikTok 的母公司字节跳动推出了最新的文本到图像生成人工智能模型,名为SDXL-Lightning。顾名思义,这个新模型只需很轻量的推理步骤(1,2,4 或 8 步)即可实现极其快速且高质量的文本到图像生成功能。与原始 SDXL 模型相比,这是一个重大突破,原始 SDXL 模型需要超过 25 个步骤才能达到同等质量。 SDXL-LIGHTNING 简介 虽然 Diffusion 模型在生成任务中取得了出色的结果,但其迭代采样过程既缓慢又计算昂贵。对于实际应用,减少所需的步骤数至关重要。之前的工作尝试了更好的 O…

第八届瑞芯微开发者大会RKDC! 2024于3月7-8日在福州喜来登酒店隆重举行。瑞芯微作为国内领先的嵌入式处理器设计企业,为高端智能硬件的多个领域提供专业芯片解决方案。本届大会以“AI芯片·AI应用·AIoT”为主题,集结最新前沿技术、大咖智见分享,展示了百款AIoT芯品,围绕万物智联,打造多场景AI应用。格蠹科技自主研发的幽兰 Arm PC(Windows on Arm)也在此次大会上惊艳亮相。 提到 Arm PC,这里我们先简要回顾一下Arm PC的发展历史。自20世纪80年代以来,Wintel联盟就一直主导…

2024年3月7日,英特尔正式发布了OpenVINO™ 2024.0版本。OpenVINO™是英特尔针对自家硬件平台开发的一套深度学习工具库,包含推理库,模型优化等等一系列与深度学习模型部署相关的功能。OpenVINO™工具包是用于快速开发应用程序和解决方案的综合工具包,可解决各种任务,包括模拟人类视觉,自动语音识别,自然语言处理,推荐系统等。该工具包基于最新一代的人工神经网络,包括卷积神经网络(CNN),循环和基于注意力的网络,可在英特尔®硬件上扩展计算机视觉和非视觉工作负载,从而最大限度地提高性能。它通过从边缘…
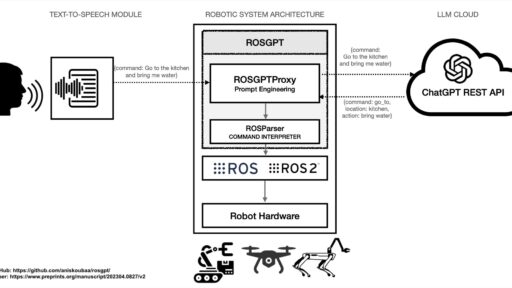
ROSGPT利用大语言模型 (LLM) 的功能来显著推进机器人的人机交互方式,通过从非结构化人类语言输入中引出结构化机器人命令,充分利用LLM的零样本和少样本学习能力。 ROSGPT 是向通用人工智能 (AGI) 迈出的新一步,为机器人和自然语言处理社区合作创造新颖、直观的人机交互铺平了道路。 ROSGPT 的开源项目地址:https://github.com/aniskoubaarosgpt。 ROSGPT的论文原文:https://www.preprints.org/manuscript/202304.0827…

ROS 2中的参数(Parameters)是一种用于在ROS 2系统中配置节点行为的重要机制。参数提供了一种在节点之间共享配置信息的标准化方式,能够在运行时动态地修改节点的行为。在本文中,我们将详细介绍ROS 2参数的概念、结构和使用方法。 参数概述 ROS 2参数允许开发者在节点中定义和使用配置参数,这些参数可以在节点启动时加载,也可以在运行时动态地修改。参数可以用于调整节点的行为、配置算法参数、设置传感器参数等。通过参数,可以使节点更加灵活、可配置,并且能够在不重新编译代码的情况下进行调整。 参数结构 ROS …




 今日访客人数 :
今日访客人数 :  本月访客人数 :
本月访客人数 :  今年访客人数 :
今年访客人数 :  总访客人数 : 455614
总访客人数 : 455614 今日浏览量 :
今日浏览量 :  总浏览量 :
总浏览量 :  在线总人数 :
在线总人数 : 您的IP地址 : 216.73.216.87