
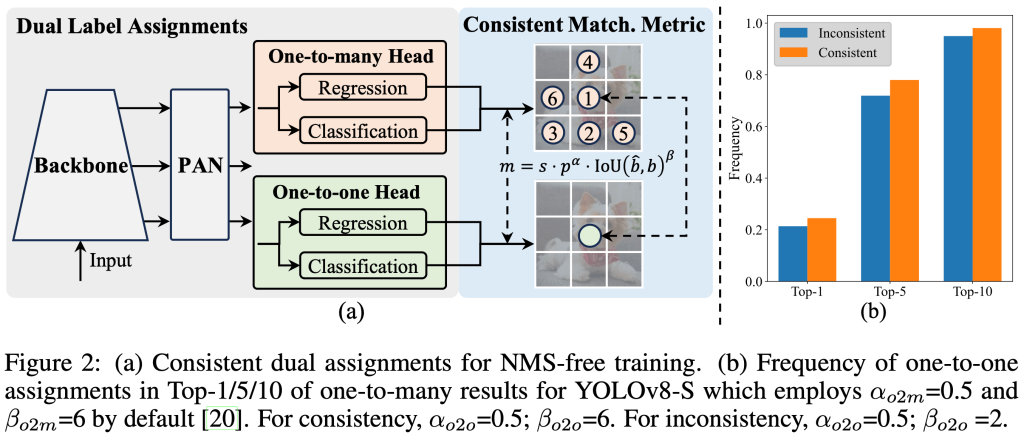
实时物体检测旨在以低延迟准确预测图像中的物体类别和位置。YOLO 系列凭借其在性能和效率之间的平衡而处于该研究的前沿。然而,对 NMS 的依赖和架构效率低下阻碍了最佳性能。YOLOv10 通过引入一致的双重分配以实现无 NMS 训练和整体效率-准确度驱动的模型设计策略来解决这些问题。
YOLOv10 由清华大学的研究人员基于Ultralytics Python 软件包开发,引入了一种实时物体检测的新方法,解决了之前 YOLO 版本中存在的后处理和模型架构缺陷。通过消除非最大抑制 (NMS) 并优化各种模型组件,YOLOv10 实现了最先进的性能,同时显著降低了计算开销。大量实验表明,它在多个模型规模上都具有出色的准确率-延迟权衡。
教程简介
本教程演示了如何使用 OpenVINO 运行和优化 PyTorch YOLO V10 的分步说明。
本教程包括以下步骤:
- 准备 PyTorch 模型
- 将 PyTorch 模型转换为 OpenVINO IR
- 使用 OpenVINO 运行模型推理
- 使用 NNCF 准备并运行优化管道
- 比较 FP16 和量化模型的性能。
- 对视频运行优化的模型推理
- 启动交互式 Gradio 演示
使用说明
这是一个独立的示例,完全依赖于其自身的代码。
关于 OpenVINO 最新版本和 Jupyter Notebook 的开发环境,可以参阅本站文章(如下),并从文章中下载包含了 OpenVINO 2024.2 最新版本和 Jupyter Notebook 环境的 docker 镜像直接运行。
优化步骤
1. Prerequisite
import os
os.environ["GIT_CLONE_PROTECTION_ACTIVE"] = "false"
%pip install -q "nncf>=2.11.0"
%pip install --pre -Uq openvino --extra-index-url https://storage.openvinotoolkit.org/simple/wheels/nightly
%pip install -q "git+https://github.com/THU-MIG/yolov10.git" --extra-index-url https://download.pytorch.org/whl/cpu
%pip install -q "torch>=2.1" "torchvision>=0.16" tqdm opencv-python "gradio>=4.19" --extra-index-url https://download.pytorch.org/whl/cpu
%pip install ipywidgets如果使用上面博文里预编译好的 docker 镜像环境,则把第 4 条命令(%pip install –pre -Uq openvino –extra-index-url https://storage.openvinotoolkit.org/simple/wheels/nightly)注释掉不用执行,否则会出现如下的版本冲突错误(因为 docker 镜像里已经安装了 2024.2 版本):
运行正常完成后则会显示如下结果:

%pip install ipywidgets注意在这一步完成后重新启动一下 python kernel,或者直接重启一下 OpenVINO 容器。
from pathlib import Path
# Fetch `notebook_utils` module
import requests
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/notebook_utils.py",
)
open("notebook_utils.py", "w").write(r.text)
from notebook_utils import download_file, VideoPlayer2. 下载 PyTorch 模型
模型作者提供了多个版本的 YOLO V10 模型。每个模型都有不同的特性,具体取决于训练参数的数量、性能和准确性。出于演示目的,我们将使用 yolov10n,但相同的步骤也适用于 YOLO V10 系列中的其他模型。
models_dir = Path("./models")
models_dir.mkdir(exist_ok=True)model_weights_url = "https://github.com/jameslahm/yolov10/releases/download/v1.0/yolov10n.pt"
file_name = model_weights_url.split("/")[-1]
model_name = file_name.replace(".pt", "")
download_file(model_weights_url, directory=models_dir)
3. 将 PyTorch 模型导出为 OpenVINO IR 格式
如前所述,YOLO V10 代码是在 Ultralytics 库的基础上设计的,并且具有与 YOLO V8 类似的接口(您可以查看 YOLO V8 笔记本以获取有关如何使用 Ultralytics API 的更详细说明)。Ultralytics 支持使用模型类的导出方法导出 OpenVINO 模型。此外,我们可以指定负责目标输入大小、静态或动态输入形状和模型精度(FP32/FP16/INT8)的参数。INT8 量化可以在导出阶段额外执行,但为了使方法更灵活,我们考虑如何使用 NNCF 执行量化。
import types
from ultralytics.utils import ops, yaml_load, yaml_save
from ultralytics import YOLOv10
import torch
detection_labels = {
0: "person",
1: "bicycle",
2: "car",
3: "motorcycle",
4: "airplane",
5: "bus",
6: "train",
7: "truck",
8: "boat",
9: "traffic light",
10: "fire hydrant",
11: "stop sign",
12: "parking meter",
13: "bench",
14: "bird",
15: "cat",
16: "dog",
17: "horse",
18: "sheep",
19: "cow",
20: "elephant",
21: "bear",
22: "zebra",
23: "giraffe",
24: "backpack",
25: "umbrella",
26: "handbag",
27: "tie",
28: "suitcase",
29: "frisbee",
30: "skis",
31: "snowboard",
32: "sports ball",
33: "kite",
34: "baseball bat",
35: "baseball glove",
36: "skateboard",
37: "surfboard",
38: "tennis racket",
39: "bottle",
40: "wine glass",
41: "cup",
42: "fork",
43: "knife",
44: "spoon",
45: "bowl",
46: "banana",
47: "apple",
48: "sandwich",
49: "orange",
50: "broccoli",
51: "carrot",
52: "hot dog",
53: "pizza",
54: "donut",
55: "cake",
56: "chair",
57: "couch",
58: "potted plant",
59: "bed",
60: "dining table",
61: "toilet",
62: "tv",
63: "laptop",
64: "mouse",
65: "remote",
66: "keyboard",
67: "cell phone",
68: "microwave",
69: "oven",
70: "toaster",
71: "sink",
72: "refrigerator",
73: "book",
74: "clock",
75: "vase",
76: "scissors",
77: "teddy bear",
78: "hair drier",
79: "toothbrush",
}
def v10_det_head_forward(self, x):
one2one = self.forward_feat([xi.detach() for xi in x], self.one2one_cv2, self.one2one_cv3)
if not self.export:
one2many = super().forward(x)
if not self.training:
one2one = self.inference(one2one)
if not self.export:
return {"one2many": one2many, "one2one": one2one}
else:
assert self.max_det != -1
boxes, scores, labels = ops.v10postprocess(one2one.permute(0, 2, 1), self.max_det, self.nc)
return torch.cat(
[boxes, scores.unsqueeze(-1), labels.unsqueeze(-1).to(boxes.dtype)],
dim=-1,
)
else:
return {"one2many": one2many, "one2one": one2one}
ov_model_path = models_dir / f"{model_name}_openvino_model/{model_name}.xml"
if not ov_model_path.exists():
model = YOLOv10(models_dir / file_name)
model.model.model[-1].forward = types.MethodType(v10_det_head_forward, model.model.model[-1])
model.export(format="openvino", dynamic=True, half=True)
config = yaml_load(ov_model_path.parent / "metadata.yaml")
config["names"] = detection_labels
yaml_save(ov_model_path.parent / "metadata.yaml", config)
4. 使用 Ultralytics API 在 AUTO 设备上运行 OpenVINO 推理
现在,当我们将模型导出到 OpenVINO 时,我们可以将其直接加载到 YOLOv10 类中,其中自动推理后端将提供易于使用的用户体验,以与原始 PyTorch 模型类似的级别运行 OpenVINO YOLOv10 模型。下面的代码演示了如何使用 Ultralytics API 在单个图像上运行 OpenVINO 导出模型的推理。AUTO 设备将用于启动模型。
ov_yolo_model = YOLOv10(ov_model_path.parent, task="detect")from PIL import Image
IMAGE_PATH = Path("./data/coco_bike.jpg")
download_file(
url="https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/image/coco_bike.jpg",
filename=IMAGE_PATH.name,
directory=IMAGE_PATH.parent,
)
res = ov_yolo_model(IMAGE_PATH, iou=0.45, conf=0.2)
Image.fromarray(res[0].plot()[:, :, ::-1])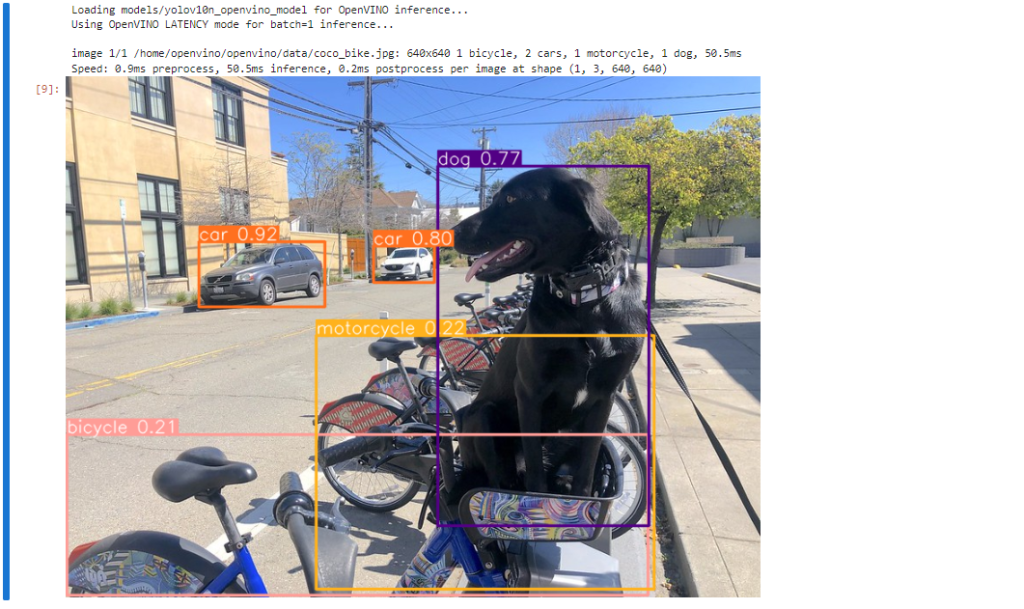
5. 使用 Ultralytics API 在选定设备上运行 OpenVINO 推理
在这一部分,您可以选择推理设备来运行模型推理,以便将结果与 AUTO 设备进行比较。
import openvino as ov
import ipywidgets as widgets
core = ov.Core()
device = widgets.Dropdown(
options=core.available_devices + ["AUTO"],
value="CPU",
description="Device:",
disabled=False,
)
device可以看到,我的设备支持 CPU,GPU(集成显卡)和 AUTO 三种设备设置。如果是第14代 Meteor Lake 平台的话,应该还会有 NPU 可以选择。

ov_model = core.read_model(ov_model_path)
# load model on selected device
if "GPU" in device.value or "NPU" in device.value:
ov_model.reshape({0: [1, 3, 640, 640]})
ov_config = {}
if "GPU" in device.value:
ov_config = {"GPU_DISABLE_WINOGRAD_CONVOLUTION": "YES"}
det_compiled_model = core.compile_model(ov_model, device.value, ov_config)ov_yolo_model.predictor.model.ov_compiled_model = det_compiled_modelres = ov_yolo_model(IMAGE_PATH, iou=0.45, conf=0.2)
Image.fromarray(res[0].plot()[:, :, ::-1])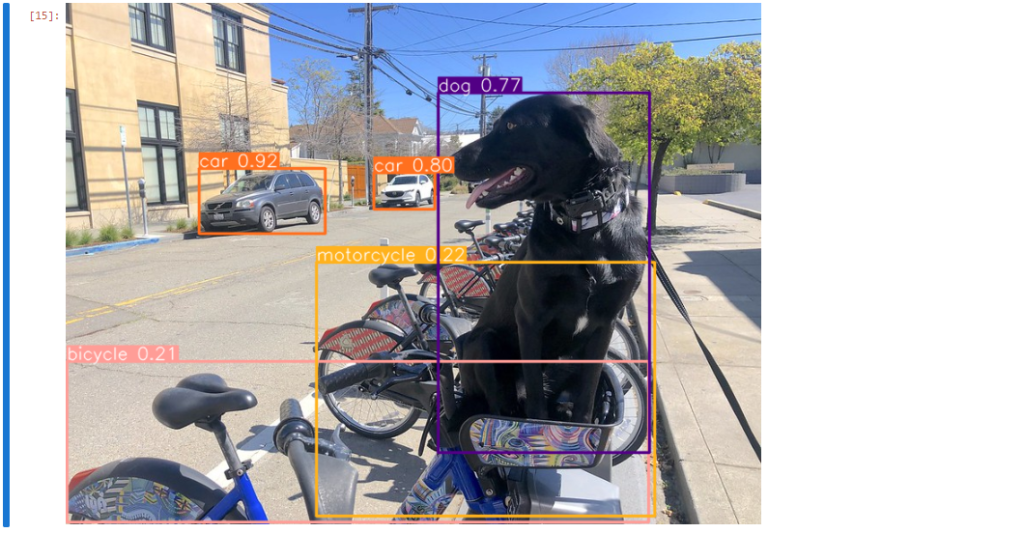
6. 使用 NNCF 训练后量化 API 优化模型
NNCF 提供了一套高级算法,用于 OpenVINO 中的神经网络推理优化,同时将准确度下降降至最低。我们将在训练后模式下使用 8 位量化(不使用微调管道)来优化 YOLOv10。
优化过程包含以下步骤:
创建用于量化的数据集。运行 nncf.quantize 以获取优化的模型。使用 openvino.save_model 函数序列化 OpenVINO IR 模型。量化是一个耗时且耗内存的过程,您可以使用下面的复选框跳过此步骤:
import ipywidgets as widgets
int8_model_det_path = models_dir / "int8" / f"{model_name}_openvino_model/{model_name}.xml"
ov_yolo_int8_model = None
to_quantize = widgets.Checkbox(
value=True,
description="Quantization",
disabled=False,
)
to_quantize
# Fetch skip_kernel_extension module
r = requests.get(
url="https://raw.githubusercontent.com/openvinotoolkit/openvino_notebooks/latest/utils/skip_kernel_extension.py",
)
open("skip_kernel_extension.py", "w").write(r.text)
%load_ext skip_kernel_extension7. 准备量化数据集
要开始量化,我们需要准备数据集。我们将使用 MS COCO 数据集中的验证子集进行模型量化,并使用 Ultralytics 验证数据加载器准备输入数据。
%%skip not $to_quantize.value
from zipfile import ZipFile
from ultralytics.data.utils import DATASETS_DIR
if not int8_model_det_path.exists():
DATA_URL = "http://images.cocodataset.org/zips/val2017.zip"
LABELS_URL = "https://github.com/ultralytics/yolov5/releases/download/v1.0/coco2017labels-segments.zip"
CFG_URL = "https://raw.githubusercontent.com/ultralytics/ultralytics/v8.1.0/ultralytics/cfg/datasets/coco.yaml"
OUT_DIR = DATASETS_DIR
DATA_PATH = OUT_DIR / "val2017.zip"
LABELS_PATH = OUT_DIR / "coco2017labels-segments.zip"
CFG_PATH = OUT_DIR / "coco.yaml"
download_file(DATA_URL, DATA_PATH.name, DATA_PATH.parent)
download_file(LABELS_URL, LABELS_PATH.name, LABELS_PATH.parent)
download_file(CFG_URL, CFG_PATH.name, CFG_PATH.parent)
if not (OUT_DIR / "coco/labels").exists():
with ZipFile(LABELS_PATH, "r") as zip_ref:
zip_ref.extractall(OUT_DIR)
with ZipFile(DATA_PATH, "r") as zip_ref:
zip_ref.extractall(OUT_DIR / "coco/images")
上述的 warning 信息并不影响使用。如果介意的话,可以修改 ~/jupyter_notebook_config.py 的相应参数。
%%skip not $to_quantize.value
from ultralytics.utils import DEFAULT_CFG
from ultralytics.cfg import get_cfg
from ultralytics.data.converter import coco80_to_coco91_class
from ultralytics.data.utils import check_det_dataset
if not int8_model_det_path.exists():
args = get_cfg(cfg=DEFAULT_CFG)
args.data = str(CFG_PATH)
det_validator = ov_yolo_model.task_map[ov_yolo_model.task]["validator"](args=args)
det_validator.data = check_det_dataset(args.data)
det_validator.stride = 32
det_data_loader = det_validator.get_dataloader(OUT_DIR / "coco", 1)
NNCF 提供 nncf.Dataset wrapper,用于在量化管道中使用原生框架数据加载器。此外,我们指定转换函数,该函数将负责以模型预期格式准备输入数据。
%%skip not $to_quantize.value
import nncf
from typing import Dict
def transform_fn(data_item:Dict):
"""
Quantization transform function. Extracts and preprocess input data from dataloader item for quantization.
Parameters:
data_item: Dict with data item produced by DataLoader during iteration
Returns:
input_tensor: Input data for quantization
"""
input_tensor = det_validator.preprocess(data_item)['img'].numpy()
return input_tensor
if not int8_model_det_path.exists():
quantization_dataset = nncf.Dataset(det_data_loader, transform_fn)
8. 量化并保存 INT8 模型
nncf.quantize 函数提供了模型量化的接口。它需要 OpenVINO 模型和量化数据集的实例。可选地,可以提供一些用于配置量化过程的附加参数(量化样本数、预设、忽略范围等)。YOLOv10 模型包含非 ReLU 激活函数,这需要对激活进行非对称量化。为了获得更好的结果,我们将使用混合量化预设。它提供权重的对称量化和激活的非对称量化。
注意:模型训练后量化是一个耗时的过程。请耐心等待,这可能需要几分钟,具体取决于您的硬件。
%%skip not $to_quantize.value
import shutil
if not int8_model_det_path.exists():
quantized_det_model = nncf.quantize(
ov_model,
quantization_dataset,
preset=nncf.QuantizationPreset.MIXED,
)
ov.save_model(quantized_det_model, int8_model_det_path)
shutil.copy(ov_model_path.parent / "metadata.yaml", int8_model_det_path.parent / "metadata.yaml")
9. 运行优化后的模型推理
INT8 量化模型的使用方法与量化前的模型相同。让我们检查一下量化模型在单张图片上的推理结果。
9.1 在 AUTO 设备上运行优化后的模型
%%skip not $to_quantize.value
ov_yolo_int8_model = YOLOv10(int8_model_det_path.parent, task="detect")%%skip not $to_quantize.value
res = ov_yolo_int8_model(IMAGE_PATH, iou=0.45, conf=0.2)
Image.fromarray(res[0].plot()[:, :, ::-1])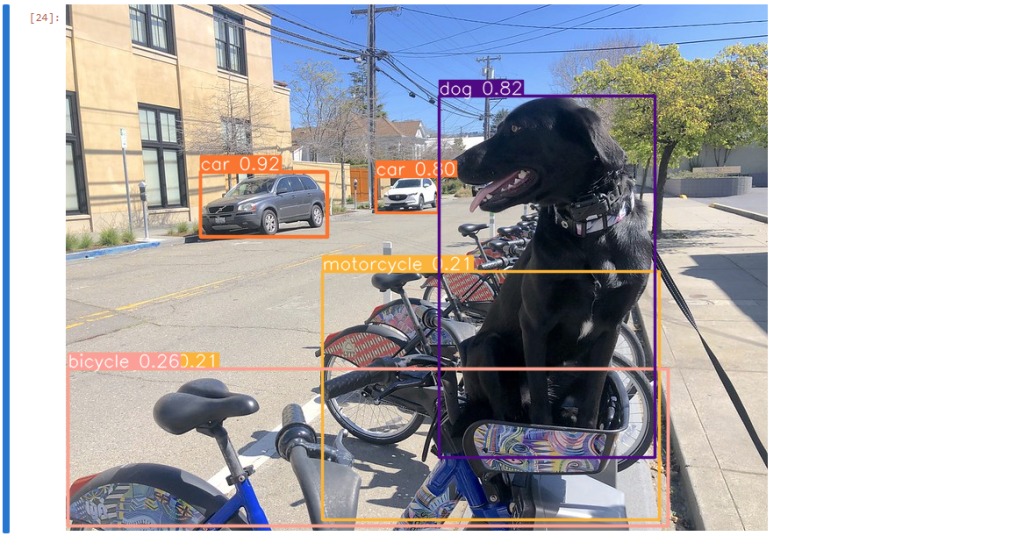
9.2 在指定的设备上运行优化后的模型
%%skip not $to_quantize.value
device%%skip not $to_quantize.value
ov_config = {}
if "GPU" in device.value or "NPU" in device.value:
ov_model.reshape({0: [1, 3, 640, 640]})
ov_config = {}
if "GPU" in device.value:
ov_config = {"GPU_DISABLE_WINOGRAD_CONVOLUTION": "YES"}
quantized_det_model = core.read_model(int8_model_det_path)
quantized_det_compiled_model = core.compile_model(quantized_det_model, device.value, ov_config)
ov_yolo_int8_model.predictor.model.ov_compiled_model = quantized_det_compiled_model
res = ov_yolo_int8_model(IMAGE_PATH, iou=0.45, conf=0.2)
Image.fromarray(res[0].plot()[:, :, ::-1])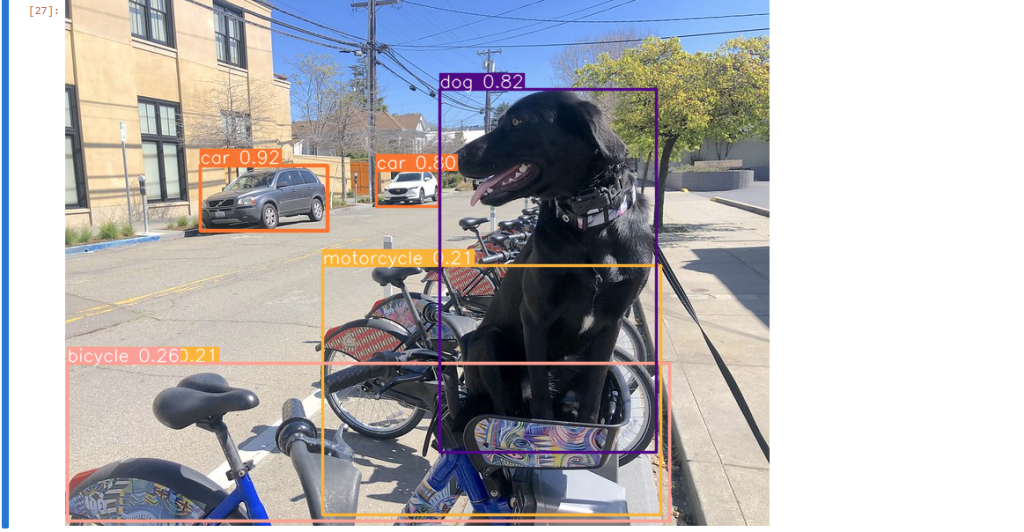
10. 比较原始模型和优化后的模型
10.1 模型大小
ov_model_weights = ov_model_path.with_suffix(".bin")
print(f"Size of FP16 model is {ov_model_weights.stat().st_size / 1024 / 1024:.2f} MB")
if int8_model_det_path.exists():
ov_int8_weights = int8_model_det_path.with_suffix(".bin")
print(f"Size of model with INT8 compressed weights is {ov_int8_weights.stat().st_size / 1024 / 1024:.2f} MB")
print(f"Compression rate for INT8 model: {ov_model_weights.stat().st_size / ov_int8_weights.stat().st_size:.3f}")
10.2 性能
10.2.1 fp16 性能
!benchmark_app -m $ov_model_path -d $device.value -api async -shape "[1,3,640,640]" -t 15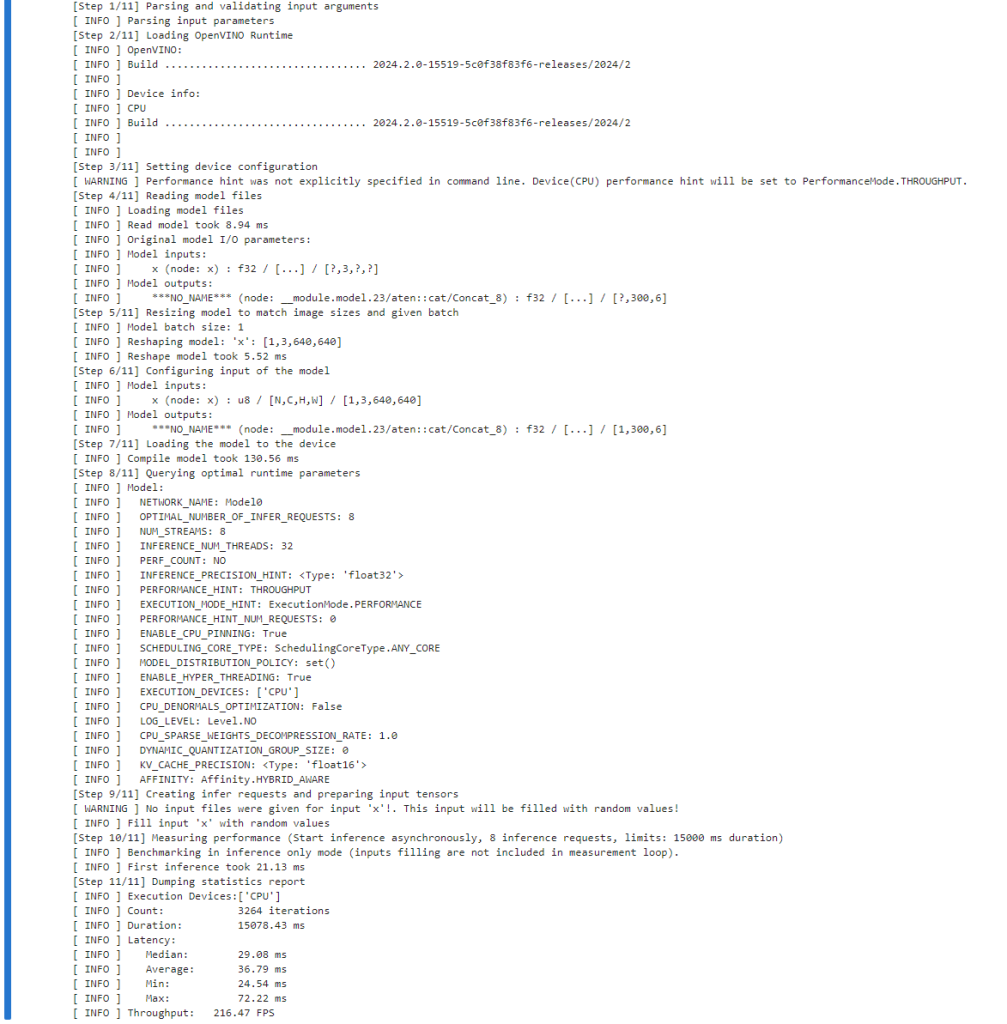
10.2.2 int8 性能
if int8_model_det_path.exists():
!benchmark_app -m $int8_model_det_path -d $device.value -api async -shape "[1,3,640,640]" -t 15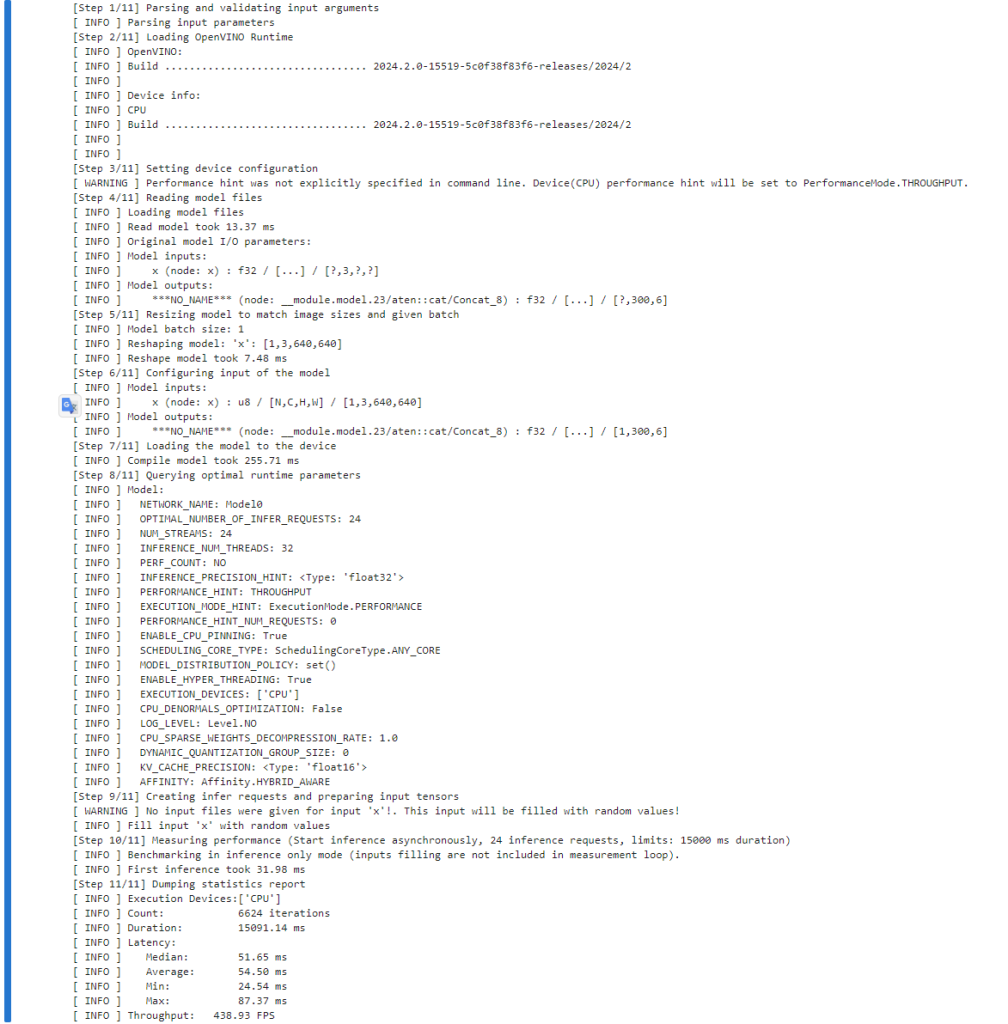
可以看到 int8 的性能是 fp16 的性能的两倍左右。
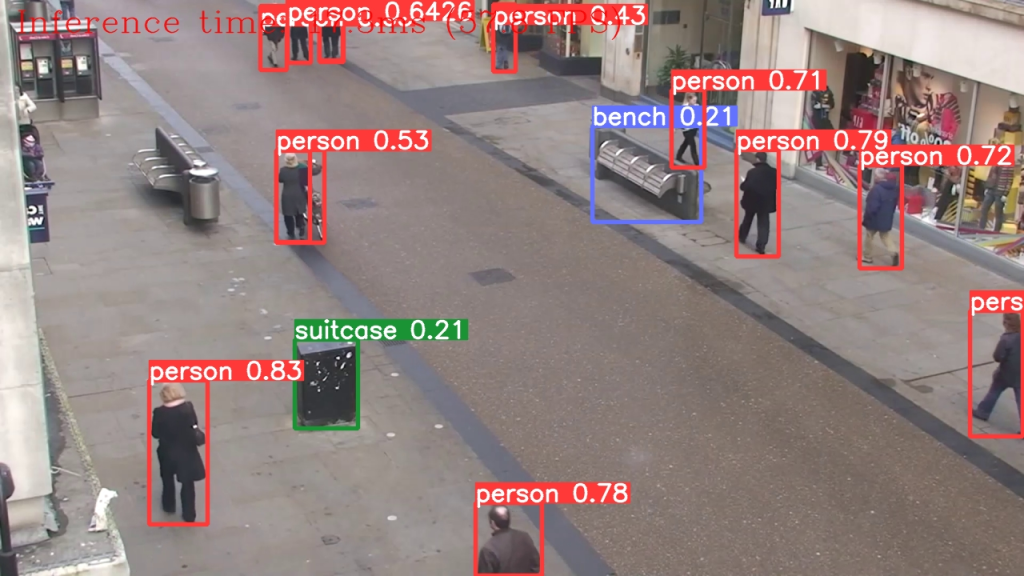
11. 视频演示
以下代码对视频运行模型推理:
import collections
import time
from IPython import display
import cv2
import numpy as np
# Main processing function to run object detection.
def run_object_detection(
source=0,
flip=False,
use_popup=False,
skip_first_frames=0,
det_model=ov_yolo_int8_model,
device=device.value,
):
player = None
try:
# Create a video player to play with target fps.
player = VideoPlayer(source=source, flip=flip, fps=30, skip_first_frames=skip_first_frames)
# Start capturing.
player.start()
if use_popup:
title = "Press ESC to Exit"
cv2.namedWindow(winname=title, flags=cv2.WINDOW_GUI_NORMAL | cv2.WINDOW_AUTOSIZE)
processing_times = collections.deque()
while True:
# Grab the frame.
frame = player.next()
if frame is None:
print("Source ended")
break
# If the frame is larger than full HD, reduce size to improve the performance.
scale = 1280 / max(frame.shape)
if scale < 1:
frame = cv2.resize(
src=frame,
dsize=None,
fx=scale,
fy=scale,
interpolation=cv2.INTER_AREA,
)
# Get the results.
input_image = np.array(frame)
start_time = time.time()
detections = det_model(input_image, iou=0.45, conf=0.2, verbose=False)
stop_time = time.time()
frame = detections[0].plot()
processing_times.append(stop_time - start_time)
# Use processing times from last 200 frames.
if len(processing_times) > 200:
processing_times.popleft()
_, f_width = frame.shape[:2]
# Mean processing time [ms].
processing_time = np.mean(processing_times) * 1000
fps = 1000 / processing_time
cv2.putText(
img=frame,
text=f"Inference time: {processing_time:.1f}ms ({fps:.1f} FPS)",
org=(20, 40),
fontFace=cv2.FONT_HERSHEY_COMPLEX,
fontScale=f_width / 1000,
color=(0, 0, 255),
thickness=1,
lineType=cv2.LINE_AA,
)
# Use this workaround if there is flickering.
if use_popup:
cv2.imshow(winname=title, mat=frame)
key = cv2.waitKey(1)
# escape = 27
if key == 27:
break
else:
# Encode numpy array to jpg.
_, encoded_img = cv2.imencode(ext=".jpg", img=frame, params=[cv2.IMWRITE_JPEG_QUALITY, 100])
# Create an IPython image.
i = display.Image(data=encoded_img)
# Display the image in this notebook.
display.clear_output(wait=True)
display.display(i)
# ctrl-c
except KeyboardInterrupt:
print("Interrupted")
# any different error
except RuntimeError as e:
print(e)
finally:
if player is not None:
# Stop capturing.
player.stop()
if use_popup:
cv2.destroyAllWindows()use_int8 = widgets.Checkbox(
value=ov_yolo_int8_model is not None,
description="Use int8 model",
disabled=ov_yolo_int8_model is None,
)
use_int8
WEBCAM_INFERENCE = False
if WEBCAM_INFERENCE:
VIDEO_SOURCE = 0 # Webcam
else:
download_file(
"https://storage.openvinotoolkit.org/repositories/openvino_notebooks/data/data/video/people.mp4",
directory="data",
)
VIDEO_SOURCE = "data/people.mp4"
run_object_detection(
det_model=ov_yolo_model if not use_int8.value else ov_yolo_int8_model,
source=VIDEO_SOURCE,
flip=True,
use_popup=False,
)
12. Gradio 交互演示
import gradio as gr
def yolov10_inference(image, int8, conf_threshold, iou_threshold):
model = ov_yolo_model if not int8 else ov_yolo_int8_model
results = model(source=image, iou=iou_threshold, conf=conf_threshold, verbose=False)[0]
annotated_image = Image.fromarray(results.plot())
return annotated_image
with gr.Blocks() as demo:
gr.HTML(
"""
<h1 style='text-align: center'>
YOLOv10: Real-Time End-to-End Object Detection using OpenVINO
</h1>
"""
)
with gr.Row():
with gr.Column():
image = gr.Image(type="numpy", label="Image")
conf_threshold = gr.Slider(
label="Confidence Threshold",
minimum=0.1,
maximum=1.0,
step=0.1,
value=0.2,
)
iou_threshold = gr.Slider(
label="IoU Threshold",
minimum=0.1,
maximum=1.0,
step=0.1,
value=0.45,
)
use_int8 = gr.Checkbox(
value=ov_yolo_int8_model is not None,
visible=ov_yolo_int8_model is not None,
label="Use INT8 model",
)
yolov10_infer = gr.Button(value="Detect Objects")
with gr.Column():
output_image = gr.Image(type="pil", label="Annotated Image")
yolov10_infer.click(
fn=yolov10_inference,
inputs=[
image,
use_int8,
conf_threshold,
iou_threshold,
],
outputs=[output_image],
)
examples = gr.Examples(
[
"data/coco_bike.jpg",
],
inputs=[
image,
],
)
try:
demo.launch(debug=True)
except Exception:
demo.launch(debug=True, share=True)



 今日访客人数 :
今日访客人数 :  本月访客人数 :
本月访客人数 :  今年访客人数 :
今年访客人数 :  总访客人数 : 449300
总访客人数 : 449300 今日浏览量 :
今日浏览量 :  总浏览量 :
总浏览量 :  在线总人数 :
在线总人数 :
文章评论